Dice Sorting Robot
Projects | | Links:
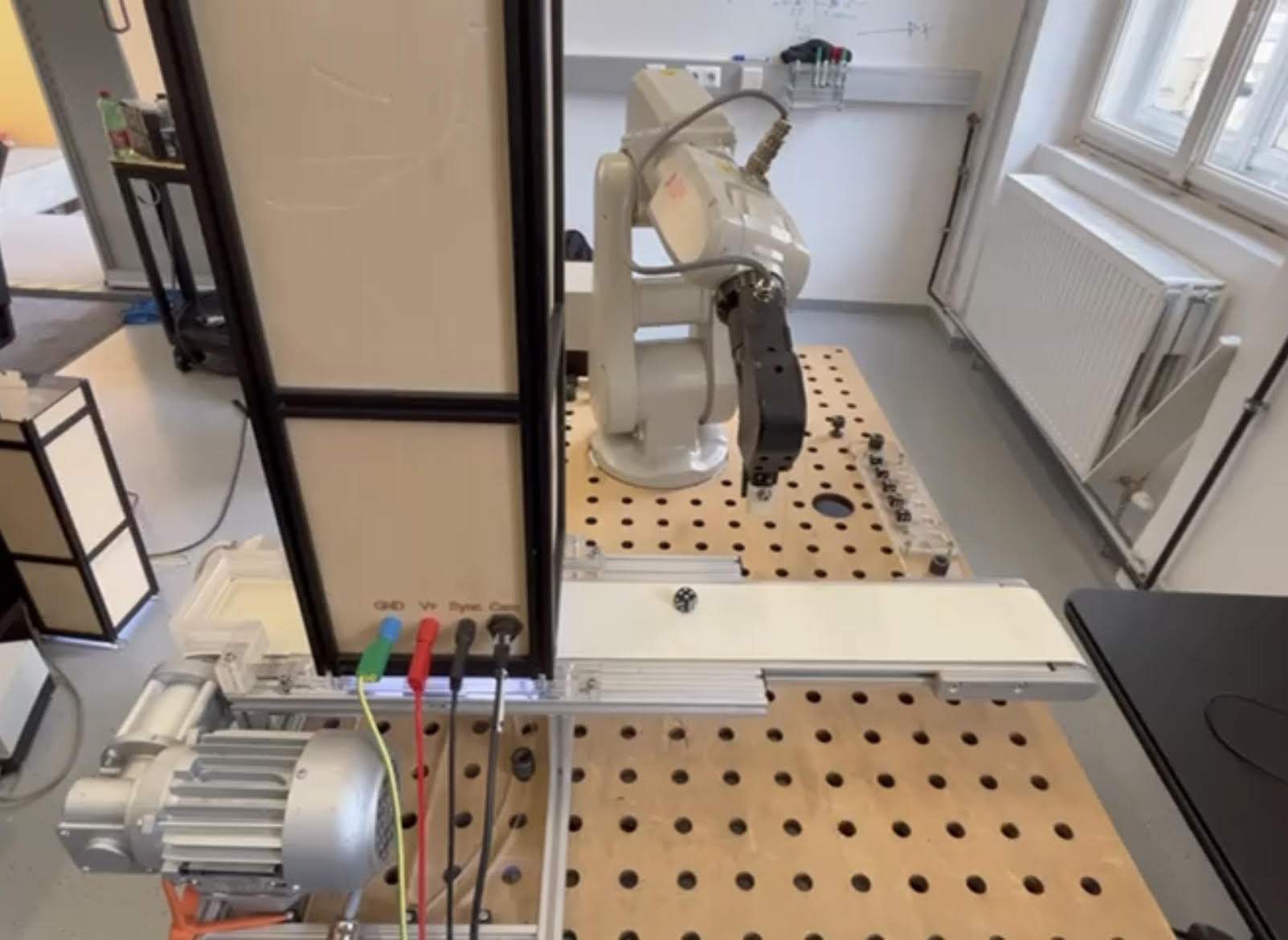
This project used an ABB robot arm and Cognex camera to track, pickup and sort dice into a tray. The robot’s move instructions were all programmed in Rapid with the Vision processing handled by a custom program ran by our Cognex camera. The robot would pick up a dice from a tray, drop it onto the conveyor and then determine where to place to the dice. It would repeat indefinitely or until stopped by the user.