Delta Manipulator Simulation
Projects | | Links:
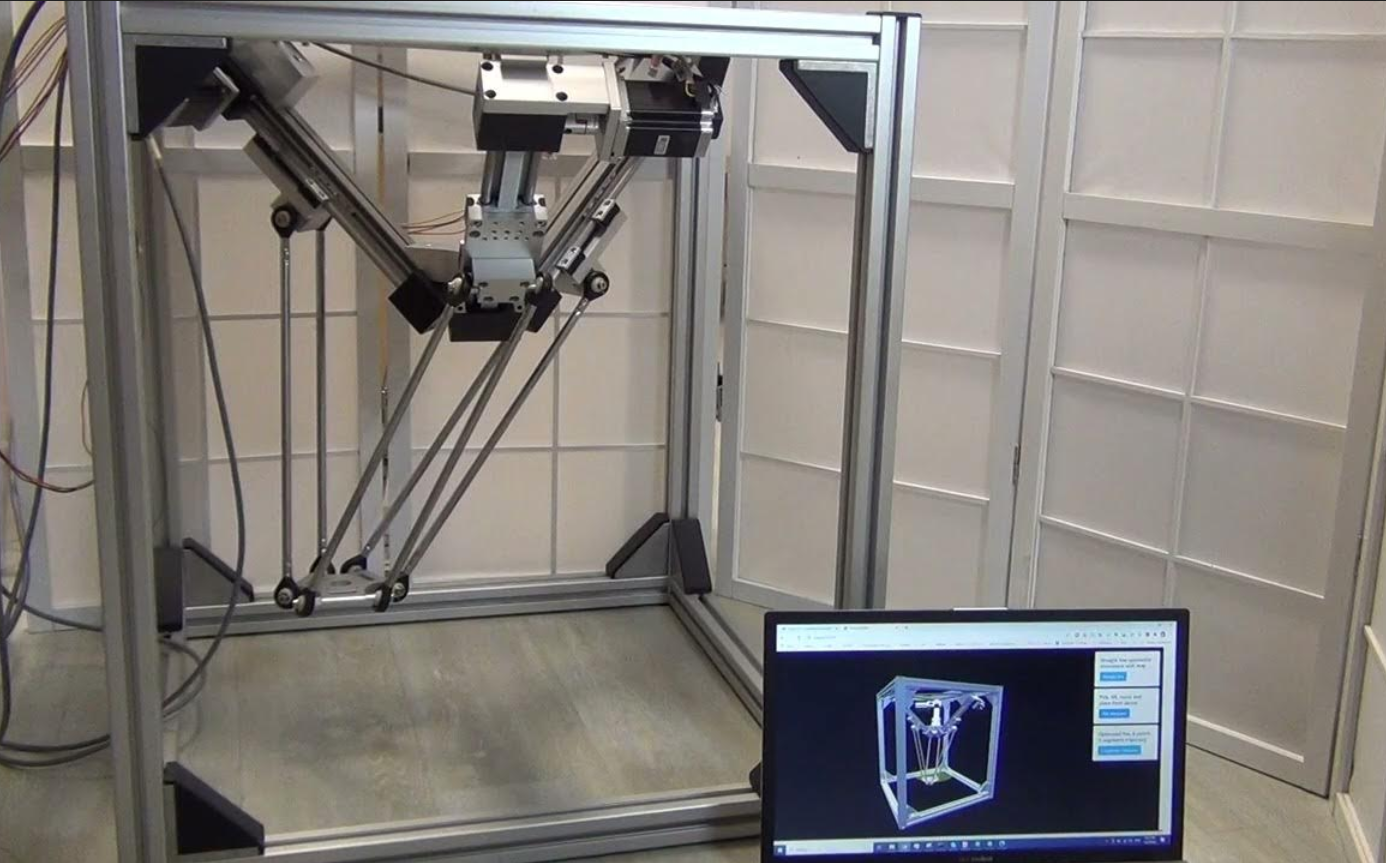
This project used Matlab, Simulink, and Simscape Multibody to model and simulate an IGUS Delta Manipulator. A desired trajectory path for the end effector was planned using trapezoidal velocity profiles. Inverse kinematics were then used to calculate joint positions based on the desired trajectory. Forward kinematics were then used to calculate the new end effector position and update the Simscape model.